10 KiB
10 KiB
Uczenie maszynowe
12. Metody optymalizacji
12.1. Warianty metody gradientu prostego
- Batch gradient descent
- Stochastic gradient descent
- Mini-batch gradient descent
_Batch gradient descent
- Klasyczna wersja metody gradientu prostego
- Obliczamy gradient funkcji kosztu względem całego zbioru uczącego: $$ \theta := \theta - \alpha \cdot \nabla_\theta J(\theta) $$
- Dlatego może działać bardzo powoli
- Nie można dodawać nowych przykładów na bieżąco w trakcie trenowania modelu (_online learning)
_Stochastic gradient descent (SGD)
Algorytm
Powtórz określoną liczbę razy (liczba epok):
- Randomizuj dane treningowe
- Powtórz dla każdego przykładu $i = 1, 2, \ldots, m$: $$ \theta := \theta - \alpha \cdot \nabla_\theta , J ! \left( \theta, x^{(i)}, y^{(i)} \right) $$
Randomizacja danych to losowe potasowanie przykładów uczących (wraz z odpowiedziami).
SGD – zalety
- Dużo szybszy niż _batch gradient descent
- Można dodawać nowe przykłady na bieżąco w trakcie trenowania (_online learning)
SGD
- Częsta aktualizacja parametrów z dużą wariancją:
- Z jednej strony dzięki temu nie utyka w złych minimach lokalnych, ale z drugiej strony może „wyskoczyć” z dobrego minimum
_Mini-batch gradient descent
Algorytm
- Ustal rozmiar "paczki/wsadu" (_batch) $b \leq m$.
- Powtórz określoną liczbę razy (liczba epok):
- Powtórz dla każdego batcha (czyli dla $i = 1, 1 + b, 1 + 2 b, \ldots$): $$ \theta := \theta - \alpha \cdot \nabla_\theta , J \left( \theta, x^{(i : i+b)}, y^{(i : i+b)} \right) $$
_Mini-batch gradient descent
- Kompromis między _batch gradient descent i SGD
- Stabilniejsza zbieżność dzięki redukcji wariancji aktualizacji parametrów
- Szybszy niż klasyczny _batch gradient descent
- Typowa wielkość batcha: między kilka a kilkaset przykładów
- Im większy batch, tym bliżej do BGD; im mniejszy batch, tym bliżej do SGD
- BGD i SGD można traktować jako odmiany MBGD dla $b = m$ i $b = 1$
# Mini-batch gradient descent - przykładowa implementacja
def MiniBatchSGD(h, fJ, fdJ, theta, X, y,
alpha=0.001, maxEpochs=1.0, batchSize=100,
logError=True):
errorsX, errorsY = [], []
m, n = X.shape
start, end = 0, batchSize
maxSteps = (m * float(maxEpochs)) / batchSize
for i in range(int(maxSteps)):
XBatch, yBatch = X[start:end,:], y[start:end,:]
theta = theta - alpha * fdJ(h, theta, XBatch, yBatch)
if logError:
errorsX.append(float(i*batchSize)/m)
errorsY.append(fJ(h, theta, XBatch, yBatch).item())
if start + batchSize < m:
start += batchSize
else:
start = 0
end = min(start + batchSize, m)
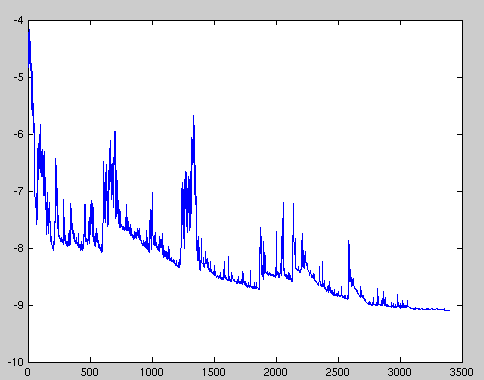
return theta, (errorsX, errorsY)Porównanie, jak zmienia się wartość funkcji kosztu podczas optymalizacji:

Wady klasycznej metody gradientu prostego, czyli dlaczego potrzebujemy optymalizacji
- Trudno dobrać właściwą szybkość uczenia (_learning rate)
- Jedna ustalona wartość stałej uczenia się dla wszystkich parametrów
- Funkcja kosztu dla sieci neuronowych nie jest wypukła, więc uczenie może utknąć w złym minimum lokalnym lub punkcie siodłowym
12.2. Algorytmy optymalizacji metody gradientu
- Momentum
- Nesterov Accelerated Gradient
- Adagrad
- Adadelta
- RMSprop
- Adam
- Nadam
- AMSGrad
Momentum
- SGD źle radzi sobie w „wąwozach” funkcji kosztu
- Momentum rozwiązuje ten problem przez dodanie współczynnika $\gamma$, który można trakować jako „pęd” spadającej piłki: $$ v_t := \gamma , v_{t-1} + \alpha , \nabla_\theta J(\theta) $$ $$ \theta := \theta - v_t $$
Przyspieszony gradient Nesterova (_Nesterov Accelerated Gradient, NAG)
- Momentum czasami powoduje niekontrolowane rozpędzanie się piłki, przez co staje się „mniej sterowna”
- Nesterov do piłki posiadającej pęd dodaje „hamulec”, który spowalnia piłkę przed wzniesieniem: $$ v_t := \gamma , v_{t-1} + \alpha , \nabla_\theta J(\theta - \gamma , v_{t-1}) $$ $$ \theta := \theta - v_t $$
Adagrad
- “Adaptive gradient”
- Adagrad dostosowuje współczynnik uczenia (_learning rate) do parametrów: zmniejsza go dla cech występujących częściej, a zwiększa dla występujących rzadziej
- Wada: współczynnik uczenia może czasami gwałtownie maleć
- Wyniki badań pokazują, że często starannie dobrane $\alpha$ daje lepsze wyniki na zbiorze testowym
Adadelta i RMSprop
- Warianty algorytmu Adagrad, które radzą sobie z problemem gwałtownych zmian współczynnika uczenia
Adam
- “Adaptive moment estimation”
- Łączy zalety algorytmów RMSprop i Momentum
- Można go porównać do piłki mającej ciężar i opór
- Obecnie jeden z najpopularniejszych algorytmów optymalizacji
Nadam
- “Nesterov-accelerated adaptive moment estimation”
- Łączy zalety algorytmów Adam i Nesterov Accelerated Gradient
AMSGrad
- Wariant algorytmu Adam lepiej dostosowany do zadań takich jak rozpoznawanie obiektów czy tłumaczenie maszynowe