4.0 MiB

Widzenie komputerowe
05. Transformacje geometryczne i cechy obrazów [laboratoria]
Andrzej Wójtowicz (2021)

W poniższych materiałach zobaczymy jak przy pomocy biblitoeki OpenCV realizować transformacje geometryczne obrazu, wyszukiwać "ciekawe" elementy obrazu oraz jak łączyć je z innymi podobnymi elementami na innych obrazach.
Na początku załadujmy niezbędne biblioteki.
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inlineTransformacje obrazu
Zacznijmy od podstawowych przekształceń geometrycznych. Aby efekt poszczególnych operacji był widoczny, dodamy pustą przestrzeń wokół testowego obrazu, na którym będziemy pracować:
lena = cv.imread("img/lena.png", cv.IMREAD_COLOR)
image = np.zeros((1024, 1024, 3), np.uint8)
for i in range(3):
image[256:768, 256:768, i] = lena[:,:, i];
plt.figure(figsize=(5,5))
plt.imshow(image[:,:,::-1]);W OpenCV transformacje afiniczne są wykonywane przy pomocy definicji macierzy 2x3 (zamiast bardziej klasycznej 3x3), która przekazywana jest do funkcji cv.warpAffine(). Poniżej mamy przykład translacji (przesunięcia) o 100 pikseli w prawo wzdłuż osi _x i o 150 pikseli wzdłuż osi y:
mat = np.float32([
[1.0, 0.0, 100],
[0.0, 1.0, 150]
])
image_translated = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_translated[:,:,::-1]);Zobaczmy co się stanie po przeskalowaniu dwukrotnym wzdłuż osi _x:
mat = np.float32([
[2.0, 0.0, 0],
[0.0, 1.0, 0]
])
image_scaled = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_scaled[:,:,::-1]);Nasz wyjściowy obraz "wyszedł" poza wymiary wejściowe, więc musimy podać w funkcji trochę większe rozmiary wynikowego obrazu (w tym wypadku chodzi o szerokość):
mat = np.float32([
[2.0, 0.0, 0],
[0.0, 1.0, 0]
])
image_scaled = cv.warpAffine(image, mat, (2*image.shape[1], image.shape[0]))
plt.figure(figsize=(10,10))
plt.imshow(image_scaled[:,:,::-1]);Poniżej mamy dwukrotne przeskalowanie w obu kierunkach (efekt jest zasadniczo widoczny patrząc na wynikowe skale obu osi):
mat = np.float32([
[2.0, 0.0, 0],
[0.0, 2.0, 0]
])
image_scaled = cv.warpAffine(image, mat, (2*image.shape[1], 2*image.shape[0]))
plt.figure(figsize=(5,5))
plt.imshow(image_scaled[:,:,::-1]);W przypadku obrotu musimy pamiętać, że mamy inaczej zdefiniowany układ współrzędnych (oś _y), więc uzyskujemy trochę inną formę macierzy obrotu:
angle = 30 * np.pi / 180.0
cos_theta = np.cos(angle)
sin_theta = np.sin(angle)
mat = np.float32([
[ cos_theta, sin_theta, 0],
[-sin_theta, cos_theta, 0]
])
image_rotated = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_rotated[:,:,::-1]);Powyżej mieliśmy obrót wokół środka układu, ale możemy też uzyskać obrót wokół wskazanego punktu, np. środka obrazu:
angle = 30 * np.pi / 180.0
cos_theta = np.cos(angle)
sin_theta = np.sin(angle)
center_x = image.shape[0] / 2
center_y = image.shape[1] / 2
t_x = (1 - cos_theta) * center_x - sin_theta * center_y
t_y = sin_theta * center_x + (1 - cos_theta) * center_y
mat = np.float32([
[ cos_theta, sin_theta, t_x],
[-sin_theta, cos_theta, t_y]
])
image_rotated = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_rotated[:,:,::-1]);Na szczęście zamiast samodzielnego liczenia macierzy obrotu można użyć funkcji cv.getRotationMatrix2D() (możemy też jej użyć do skalowania):
mat = cv.getRotationMatrix2D((center_x, center_y), 30, 1)
image_rotated = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_rotated[:,:,::-1]);Poniżej mamy przykład pochylenia:
mat = np.float32([
[1.0, 0.1, 0],
[0.0, 1.0, 0]
])
image_sheared = cv.warpAffine(image, mat, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_sheared[:,:,::-1]);Jeżeli mamy kilka transformacji do wykonania, to bardziej efektywnym rozwiązaniem będzie uprzednie wymnożenie macierzy odpowiedzialnych za poszczególne transformacje (zamiast sukcesywnego wykonywania pojedynczych, izolowanych operacji):
m_scale = np.float32([
[0.5, 0.0],
[0.0, 1.0]
])
m_shear = np.float32([
[1.0, 0.1],
[0.0, 1.0]
])
m_rotation = np.float32([
[ cos_theta, sin_theta],
[-sin_theta, cos_theta]
])
v_translation = np.float32([
[150],
[90]
])
mat_tmp = m_rotation @ m_shear @ m_scale
mat_transformation = np.append(mat_tmp, v_translation, 1)
image_transformed = cv.warpAffine(image, mat_transformation, image.shape[0:2])
plt.figure(figsize=(5,5))
plt.imshow(image_transformed[:,:,::-1]);Dla punktów o konkretnych współrzędnych możemy też obliczyć ich docelowe współrzędne po transformacjach:
src_points = np.float32([[50, 50], [50, 249], [249, 50], [249, 249]])
dst_points = (mat_tmp @ src_points.T + v_translation).T
print(dst_points)[[200.98076 118.30127] [317.71466 280.6903 ] [287.15027 68.55127] [403.88422 230.94032]]
Mając co najmniej 3 punkty wejściowe i ich odpowiedniki wyjściowe, możemy oszacować macierz transformacji przy pomocy funkcji cv.estimateAffine2D():
mat_estimated_1 = cv.estimateAffine2D(src_points[:3], dst_points[:3])[0]
print("Explicit matrix:\n\n", mat_transformation)
print("\nEstimated matrix:\n\n", mat_estimated_1)Explicit matrix: [[ 0.4330127 0.58660257 150. ] [ -0.25 0.8160254 90. ]] Estimated matrix: [[ 0.43301261 0.58660252 150.00000192] [ -0.25 0.81602532 90.00000368]]
Mając więcej punktów możemy spróbować uzyskać dokładniejsze oszacowanie:
mat_estimated_2 = cv.estimateAffine2D(src_points, dst_points)[0]
print("Explicit matrix:\n\n", mat_transformation)
print("\nEstimated matrix:\n\n", mat_estimated_2)Explicit matrix: [[ 0.4330127 0.58660257 150. ] [ -0.25 0.8160254 90. ]] Estimated matrix: [[ 0.43301273 0.58660264 149.99997897] [ -0.24999996 0.81602536 89.99999603]]
Załóżmy, że chcielibyśmy teraz uzyskać zmianę perspektywy, co w efekcie spowodowałoby, że nasz kwadratowy obraz zamieniłby się w trapez:
image_to_transform = np.zeros(image.shape, dtype=np.float32)
dst_points = np.float32([[356, 256], [667, 256], [767, 767], [256, 767]])
cv.fillConvexPoly(image_to_transform, np.int32(dst_points), (0.8, 0.8, 0.5), cv.LINE_AA);
plt.figure(figsize=[10,10])
plt.subplot(121)
plt.imshow(image[:,:,::-1])
plt.title('Original image')
plt.subplot(122)
plt.imshow(image_to_transform[:,:,::-1])
plt.title('Destination plane');Niestety przy pomocy transformacji afinicznych nie jesteśmy w stanie uzyskać zakładanego efektu:
src_points = np.float32([[256, 256], [767, 256], [767, 767], [256, 767]])
mat_estimated = cv.estimateAffine2D(src_points, dst_points)[0]
image_transformed_a = cv.warpAffine(image, mat_estimated, image.shape[0:2])
plt.figure(figsize=[15,10])
plt.subplot(131)
plt.imshow(image[:,:,::-1])
plt.title('Original image')
plt.subplot(132)
plt.imshow(image_to_transform[:,:,::-1])
plt.title('Destination plane')
plt.subplot(133)
plt.imshow(image_transformed_a[:,:,::-1])
plt.title('Transformed image (affine)');Do uzyskania zakładanego efektu musimy znaleźć macierz homografii 3x3 przy pomocy co najmniej 4 punktów i funkcji cv.findHomography():
mat_h = cv.findHomography(src_points, dst_points)[0]
print(mat_h)[[ 5.08838663e-01 -3.27547619e-01 2.51229024e+02] [ 0.00000000e+00 3.44904761e-01 1.25737302e+02] [ 0.00000000e+00 -6.40366802e-04 1.00000000e+00]]
Przy pomocy funkcji cv.warpPerspective() możemy dokonać teraz zmiany perspektywy:
image_transformed_h = cv.warpPerspective(image, mat_h, image.shape[0:2])
plt.figure(figsize=[20,10])
plt.subplot(141)
plt.imshow(image[:,:,::-1])
plt.title('Original image')
plt.subplot(142)
plt.imshow(image_to_transform[:,:,::-1])
plt.title('Destination plane')
plt.subplot(143)
plt.imshow(image_transformed_a[:,:,::-1])
plt.title('Transformed image (affine)')
plt.subplot(144)
plt.imshow(image_transformed_h[:,:,::-1])
plt.title('Transformed image (homography)');Poprzez znalezienie macierzy homografii i zmianę perspektywy możemy np. wyrównywać zdjęcia dokumentów w celu ich dalszej analizy. Poniżej mamy przykład z oznaczeniem okładki zeszytu:
book = cv.imread("img/caribou.jpg", cv.IMREAD_COLOR)
image_h, image_w = book.shape[0:2]
src_points = np.array([[210, 190], [380, 280], [290, 500], [85, 390]], dtype=float)
dst_points = np.array([[0, 0],[image_w-1, 0], [image_w-1, image_h-1], [0, image_h-1]], dtype=float)
colors = [(0,0,255), (0,255,0), (255,0,0), (90,200,200)]
for (x,y), i in(zip(src_points, colors)):
book = cv.circle(book, (int(x),int(y)), 10, i, -1)
mat = cv.findHomography(src_points, dst_points)[0]
book_aligned = cv.warpPerspective(book, mat, (image_w, image_h))
plt.figure(figsize=[10,10])
plt.subplot(121)
plt.imshow(book[:,:,::-1])
plt.title('Original image')
plt.subplot(122)
plt.imshow(book_aligned[:,:,::-1])
plt.title('Aligned image');W przypadku dokumentów, możemy np. dysponować wzorem dokumentu do uzupełnienia oraz zdjęciem wypełnionego dokumentu. Po wyrówaniu zdjęcia moglibyśmy łatwiej analizować wypełnione pola:
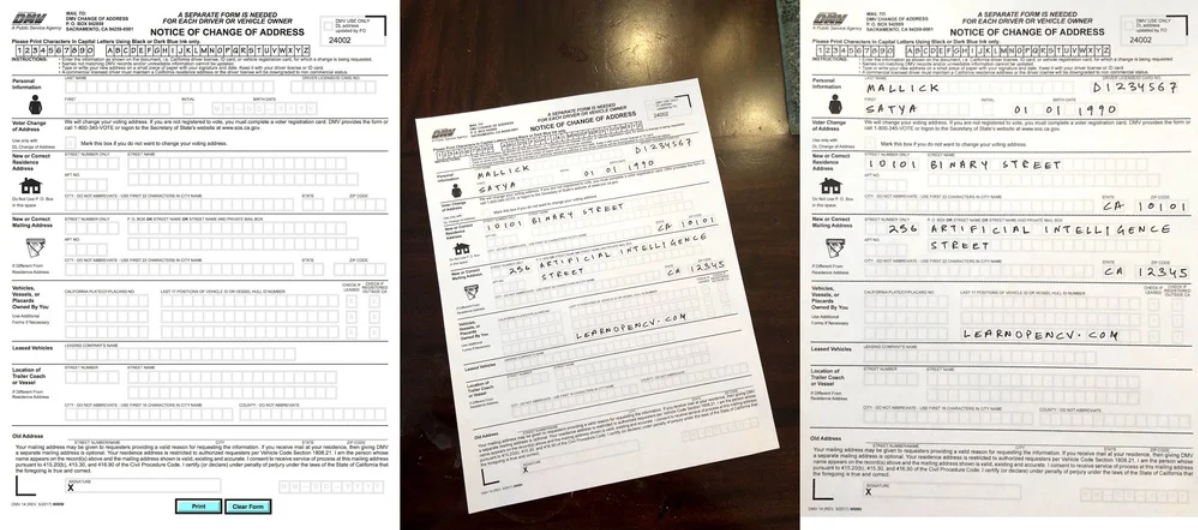
Cztery niezbędne punkty moglibyśmy wybierać ręcznie, jednak w przypadku masowego przetwarzania lepszym rozwiązaniem jest automatyczne znalezienie odpowiadających sobie punktów (niekoniecznie rogów dokumentu) na wzorcu i przetwarzanym zdjęciu. Poniżej zobaczymy jak można znaleźć i dopasować takie punkty.
Punkty kluczowe
Punkty kluczowe (ang. _keypoints) są punktami na obrazie, o których możemy myśleć w kategoriach dobrze zdefiniowanych narożników, relatywnie odpornych na przekształcenia obrazu. Każdy punkt kluczowy ma przypisany descryptor tj. wektor cech.
Wczytajmy przykładowy obraz, na którym postaramy się znaleźć takie punkty kluczowe:
python_book = cv.imread("img/book-python-cover.jpg", cv.IMREAD_COLOR)
python_book_gray = cv.cvtColor(python_book, cv.COLOR_BGR2GRAY)
plt.figure(figsize=[10,10])
plt.subplot(121)
plt.imshow(python_book[:,:,::-1])
plt.title('Original image')
plt.subplot(122)
plt.imshow(python_book_gray, cmap='gray')
plt.title('Grayscale image');Jednym z najpopularniejszych (i nieopatentowanych) algorytmów wykrywania i opisywania punktów kluczowych jest ORB (dokumentacja). Poniżej znajduje się wizualizacja wykrytych punktów kluczowych:
orb_alg = cv.ORB_create()
keypoints_1 = orb_alg.detect(python_book_gray, None)
keypoints_1, descriptors_1 = orb_alg.compute(python_book_gray, keypoints_1)
python_book_keypoints = cv.drawKeypoints(python_book, keypoints_1, None, color=(0,255,0),
flags=cv.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
plt.figure(figsize=(10,10))
plt.imshow(python_book_keypoints[:,:,::-1])
plt.title('Image keypoints');Łączenie punktów kluczowych
Załóżmy, że chcemy sprawdzić czy na danym zdjęciu znajduje się okładka powyższej książki:
book_in_hands = cv.imread("img/book-python-in-hands.jpg", cv.IMREAD_COLOR)
book_in_hands_gray = cv.cvtColor(book_in_hands, cv.COLOR_BGR2GRAY)
plt.figure(figsize=[10,10])
plt.subplot(121)
plt.imshow(book_in_hands[:,:,::-1])
plt.title('Original image')
plt.subplot(122)
plt.imshow(book_in_hands_gray, cmap='gray')
plt.title('Grayscale image');Na początku znajdźmy i opiszmy punkty kluczowe. Oba kroki możemy wykonać jednocześnie przy pomocy metody detectAndCompute():
orb_alg = cv.ORB_create(nfeatures=1000)
keypoints_1, descriptors_1 = orb_alg.detectAndCompute(python_book_gray, None)
keypoints_2, descriptors_2 = orb_alg.detectAndCompute(book_in_hands_gray, None)Jeśli uda nam się połączyć odpowiadające sobie punkty kluczowe i wyliczyć macierz homografii, to z dość dużą dozą pewności będziemy mogli przyjąć, że na zdjęciu znajduje się szukany obiekt i będziemy mogli z grubsza wskazać gdzie on się znajduje. Punkty kluczowe są opisane przez wektory, więc np. moglibyśmy _brute-forcem i odległością Hamminga poszukać najlepszych odpowiedników. W poniższym przypadku pozostawimy 5% najlepszych dopasowań i zwizualizujemy te dopasowania:
matcher = cv.DescriptorMatcher_create(cv.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
matches = matcher.match(descriptors_1, descriptors_2, None)
matches = list(matches)
matches.sort(key=lambda x: x.distance, reverse=False) # sort by distance
num_good_matches = int(len(matches) * 0.05) # save 5%
matches = matches[:num_good_matches]
image_matched = cv.drawMatches(python_book, keypoints_1, book_in_hands, keypoints_2, matches, None)
plt.figure(figsize=(10,10))
plt.imshow(image_matched[...,::-1]);Jak widać część punktów jest niepoprawnie dopasowana. Na szczęście obliczenie macierzy homografii odbywa się przy pomocy algorytmu RANSAC (ang. _random sample consensus), co pozwala wziąć pod uwagę, że pewne odzwierciedlenia są złe. Aby oznaczyć miejsce występowania obiektu, transformujemy współrzędne narożników źródłowego zdjęcia przy użyciu otrzymanej macierzy i funkcji cv.perspectiveTransform():
src_pts = np.float32([keypoints_1[m.queryIdx].pt for m in matches]).reshape(-1,1,2)
dst_pts = np.float32([keypoints_2[m.trainIdx].pt for m in matches]).reshape(-1,1,2)
mat, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC, 5.0)
matches_mask = mask.ravel().tolist()
height, width, _ = python_book.shape
pts = np.float32([[0,0], [0,height-1], [width-1,height-1], [width-1,0]]).reshape(-1,1,2)
dst = cv.perspectiveTransform(pts, mat)
book_in_hands_poly = cv.polylines(book_in_hands,
[np.int32(dst)], True, (0,0,255),
10, cv.LINE_AA)
draw_params = dict(matchColor=(0,255,0),
matchesMask=matches_mask, # draw only inliers
flags=2) # NOT_DRAW_SINGLE_POINTS
image_matched = cv.drawMatches(python_book, keypoints_1,
book_in_hands_poly, keypoints_2,
matches, None, **draw_params)
plt.figure(figsize=(10,10))
plt.imshow(image_matched[...,::-1]);Zadanie 1
Napisz interaktywną aplikację przy pomocy HighGUI, która pozwoli na obrazie img/billboards.jpg wybrać 4 punkty i umieścić w zaznaczonym obszarze wybrany obraz, np. img/bakery.jpg.

Zadanie 2
Załóżmy, że mamy dwa zdjęcia, które chcielibyśmy połączyć w panoramę:
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
boat_1 = cv.imread("img/boat_1.jpg", cv.IMREAD_COLOR)
boat_2 = cv.imread("img/boat_2.jpg", cv.IMREAD_COLOR)
plt.figure(figsize=[10,10])
plt.subplot(121)
plt.imshow(boat_1[:,:,::-1])
plt.title('Image 1')
plt.subplot(122)
plt.imshow(boat_2[:,:,::-1])
plt.title('Image 2');Standardowo w OpenCV panoramę tworzy się przy pomocy klasy Stitcher, której można podać listę zdjęć do połączenia:
stitcher_alg = cv.Stitcher_create()
_, panorama = stitcher_alg.stitch([boat_1, boat_2])
plt.figure(figsize=[20,10])
plt.imshow(panorama[:,:,::-1])
plt.title('Panorama');Spróbuj zaimplementować samodzielne stworzenie panoramy. Poniższy efekt będzie wystarczający, aczkolwiek możesz również spróbować zniwelować widoczną różnicę w intensywnościach na granicy zdjęć.

class Image_Stitching():
def __init__(self) :
self.ratio=0.85
self.min_match=10
self.sift=cv.xfeatures2d.SIFT_create()
self.smoothing_window_size=800
def registration(self,img1,img2):
kp1, des1 = self.sift.detectAndCompute(img1, None)
kp2, des2 = self.sift.detectAndCompute(img2, None)
matcher = cv.BFMatcher()
raw_matches = matcher.knnMatch(des1, des2, k=2)
good_points = []
good_matches=[]
for m1, m2 in raw_matches:
if m1.distance < self.ratio * m2.distance:
good_points.append((m1.trainIdx, m1.queryIdx))
good_matches.append([m1])
img3 = cv.drawMatchesKnn(img1, kp1, img2, kp2, good_matches, None, flags=2)
cv.imwrite('matching.jpg', img3)
if len(good_points) > self.min_match:
image1_kp = np.float32(
[kp1[i].pt for (_, i) in good_points])
image2_kp = np.float32(
[kp2[i].pt for (i, _) in good_points])
H, status = cv.findHomography(image2_kp, image1_kp, cv.RANSAC,5.0)
return H
def create_mask(self,img1,img2,version):
height_img1 = img1.shape[0]
width_img1 = img1.shape[1]
width_img2 = img2.shape[1]
height_panorama = height_img1
width_panorama = width_img1 +width_img2
offset = int(self.smoothing_window_size / 2)
barrier = img1.shape[1] - int(self.smoothing_window_size / 2)
mask = np.zeros((height_panorama, width_panorama))
if version== 'left_image':
mask[:, barrier - offset:barrier + offset ] = np.tile(np.linspace(1, 0, 2 * offset ).T, (height_panorama, 1))
mask[:, :barrier - offset] = 1
else:
mask[:, barrier - offset :barrier + offset ] = np.tile(np.linspace(0, 1, 2 * offset ).T, (height_panorama, 1))
mask[:, barrier + offset:] = 1
return cv.merge([mask, mask, mask])
def blending(self,img1,img2):
H = self.registration(img1,img2)
height_img1 = img1.shape[0]
width_img1 = img1.shape[1]
width_img2 = img2.shape[1]
height_panorama = height_img1
width_panorama = width_img1 +width_img2
panorama1 = np.zeros((height_panorama, width_panorama, 3))
mask1 = self.create_mask(img1,img2,version='left_image')
panorama1[0:img1.shape[0], 0:img1.shape[1], :] = img1
panorama1 *= mask1
mask2 = self.create_mask(img1,img2,version='right_image')
panorama2 = cv.warpPerspective(img2, H, (width_panorama, height_panorama))*mask2
result=panorama1+panorama2
rows, cols = np.where(result[:, :, 0] != 0)
min_row, max_row = min(rows), max(rows) + 1
min_col, max_col = min(cols), max(cols) + 1
final_result = result[min_row:max_row, min_col:max_col, :]
return final_result
def main(img1,img2):
final=Image_Stitching().blending(img1,img2)
cv.imwrite('panorama.jpg', final)
main(boat_1, boat_2)
panorama_jpg = cv.imread("panorama.jpg", cv.IMREAD_COLOR)
plt.figure(figsize=[10,10])
plt.imshow(panorama_jpg[:,:,::-1])
plt.title('Panorama')
[ WARN:0@11.790] global /io/opencv_contrib/modules/xfeatures2d/misc/python/shadow_sift.hpp (13) SIFT_create DEPRECATED: cv.xfeatures2d.SIFT_create() is deprecated due SIFT tranfer to the main repository. https://github.com/opencv/opencv/issues/16736
Text(0.5, 1.0, 'Panorama')